



უსაფრთხოების სცენარებში, სათვალთვალო მოწყობილობები ხშირად ექვემდებარება ქარს - გამოწვეული რხევები გრძელი - დისტანციური ინსტალაციის გამო. ხოლო კამერა ფართო - კუთხის რეჟიმი აჩვენებს მინიმალურ მგრძნობელობას გარე დარღვევების მიმართ, ტელეტო რეჟიმი ოპტიკურად აძლიერებს მექანიკურ ვიბრაციებს, რაც იწვევს მნიშვნელოვან გამოსახულებას ბუნდოვანებას ან თუნდაც სამიზნე ფოკუსის დაკარგვას. შესაბამისად, აქტიური სტაბილიზაციის მექანიზმები გამოჩნდა, როგორც კრიტიკული ტექნიკური მოთხოვნა გრძელი - დიაპაზონის სათვალთვალო სისტემებისთვის. სტაბილიზაციის ამჟამინდელი ტექნოლოგიები, პირველ რიგში, ორ კატეგორიაში შედის: ოპტიკური გამოსახულების სტაბილიზაცია (OIS) და ელექტრონული გამოსახულების სტაბილიზაცია (EIS).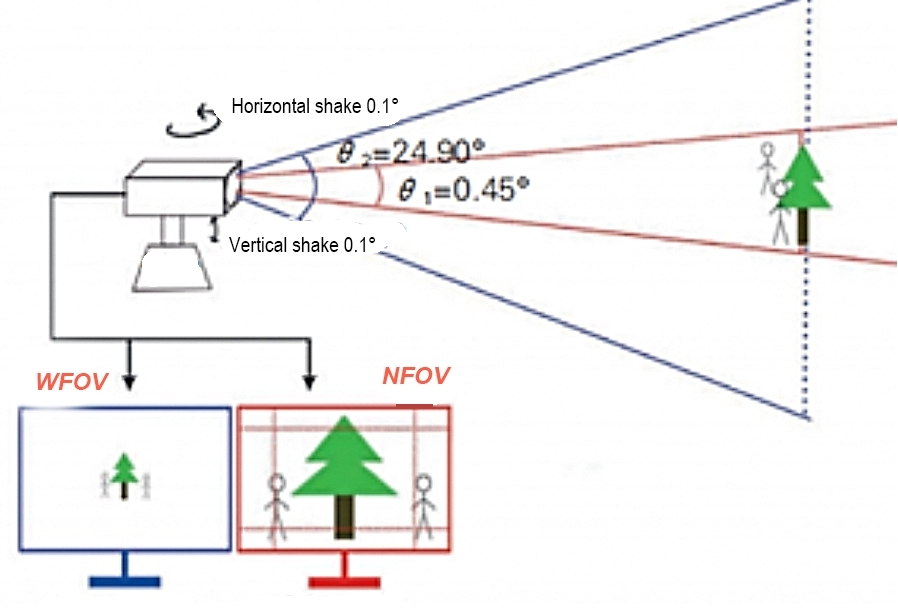
EIS იყენებს სურათის პოსტს - დამუშავების ალგორითმი გამოსახულების სტაბილიზაციის მისაღწევად. იგი მოითხოვს მიმდინარე დარტყმის გაფართოებას, რის შედეგადაც 10% - 20% დაკარგა მონიტორინგის ველი. EIS ტექნოლოგიაში, ობიექტივი პასუხისმგებელია მხოლოდ გამოსახულების შეძენაზე. მას შემდეგ, რაც სენსორი ქმნის გამოსახულებას, ის ჯერ უნდა იყოს გამოსახულების სტაბილიზაცია, აშენებული - Image პროცესორის ძირითადი ალგორითმის გამოყენებით, შემდეგ კი ვიდეო შეკუმშული და გადაცემულია. ამ ტიპის გამოსახულების სტაბილიზაცია სრულად მიიღწევა ციფრული დამუშავების ტექნოლოგიის საშუალებით, რაც ამცირებს ვიდეოს ხარისხს და აქვს ზოგადი სტაბილიზაციის ეფექტი. იგი ზოგადად გამოიყენება დაბალ - ბოლო პროდუქტებში, მისი ღირებულების უპირატესობის გამო.

OIS იყენებს აშენებულ - გიროსკოპში, ლინზების ასამბლეის შიგნით, კამერის ვიბრაციების გამოსავლენად. გიროსკოპი გარდაქმნის მექანიკური მოძრაობის მონაცემებს OIS კონტროლერში გადაცემულ ელექტრონულ სიგნალებად. კონტროლერის ცენტრალური გადამამუშავებელი განყოფილება დაუყოვნებლივ აანალიზებს და ითვლის იმ გადაადგილებას ან კუთხეს, რომელსაც ობიექტივი სჭირდება კომპენსაცია, და იყენებს ელექტრომაგნიტურ ძალას, რომელიც წარმოიქმნება სამი ნაკრებით კოჭებითა და მაგნიტებით, წამყვანი ძრავის საშუალებით, რათა ზუსტად მართოს ობიექტივი დახრილი, შეასწოროს ოპტიკური ბილიკი და თავიდან აიცილოს ოპტიკური ბილიკი და თავიდან აიცილოს გამოსახულების ბუნდოვანი. ოპტიკური დიზაინით, მოძრავი ობიექტივის დამატებით, ლინზების ცვლა კონტროლდება შერყევის ოდენობის საფუძველზე, კომპენსაციური ოპტიკური გზის სტაბილურ მდგომარეობაში.
თითოეული ექსპოზიციის ციკლის ფარგლებში, OIS თანმიმდევრულად უნდა შეასრულოს: ვიბრაციის გამოვლენა, სიგნალის დამუშავება და კომპენსატორული ლინზების მოქმედება. მთელი პროცესი არის სერვო მოძრაობა, რომელსაც ასევე აქვს მოკლე გამოვლენის დროის მახასიათებლები, სიგნალის დამუშავების სწრაფი სიჩქარე, მცირე ლინზების კომპენსაციის მოძრაობა და იღებს მარტივ და შედარებით სტაბილურ PID კონტროლის ალგორითმს.